
Non-line-of-sight (NLOS) imaging and tracking is an emerging technology that allows the shape or position of objects around corners or behind diffusers to be recovered from transient, time-of-flight measurements. However, existing NLOS approaches require the imaging system to scan a large area on a visible surface, where the indirect light paths of hidden objects are sampled. In many applications, such as robotic vision or autonomous driving, optical access to a large scanning area may not be available, which severely limits the practicality of existing NLOS techniques. Here, we propose a new approach, dubbed keyhole imaging, that captures a sequence of transient measurements along a single optical path, for example, through a keyhole. Assuming that the hidden object of interest moves during the acquisition time, we effectively capture a series of time-resolved projections of the object’s shape from unknown viewpoints. We derive inverse methods based on expectation-maximization to recover the object’s shape and location using these measurements. Then, with the help of long exposure times and retroreflective tape, we demonstrate successful experimental results with a prototype keyhole imaging system. FILES
- Technical Paper and Supplement (link)
CITATION
C. Metzler, D. Lindell, G. Wetzstein, Keyhole Imaging: Non-Line-of-Sight Imaging and Tracking of Moving Objects Along a Single Optical Path, IEEE Transactions on Computational Imaging, 2021.
Overview of results
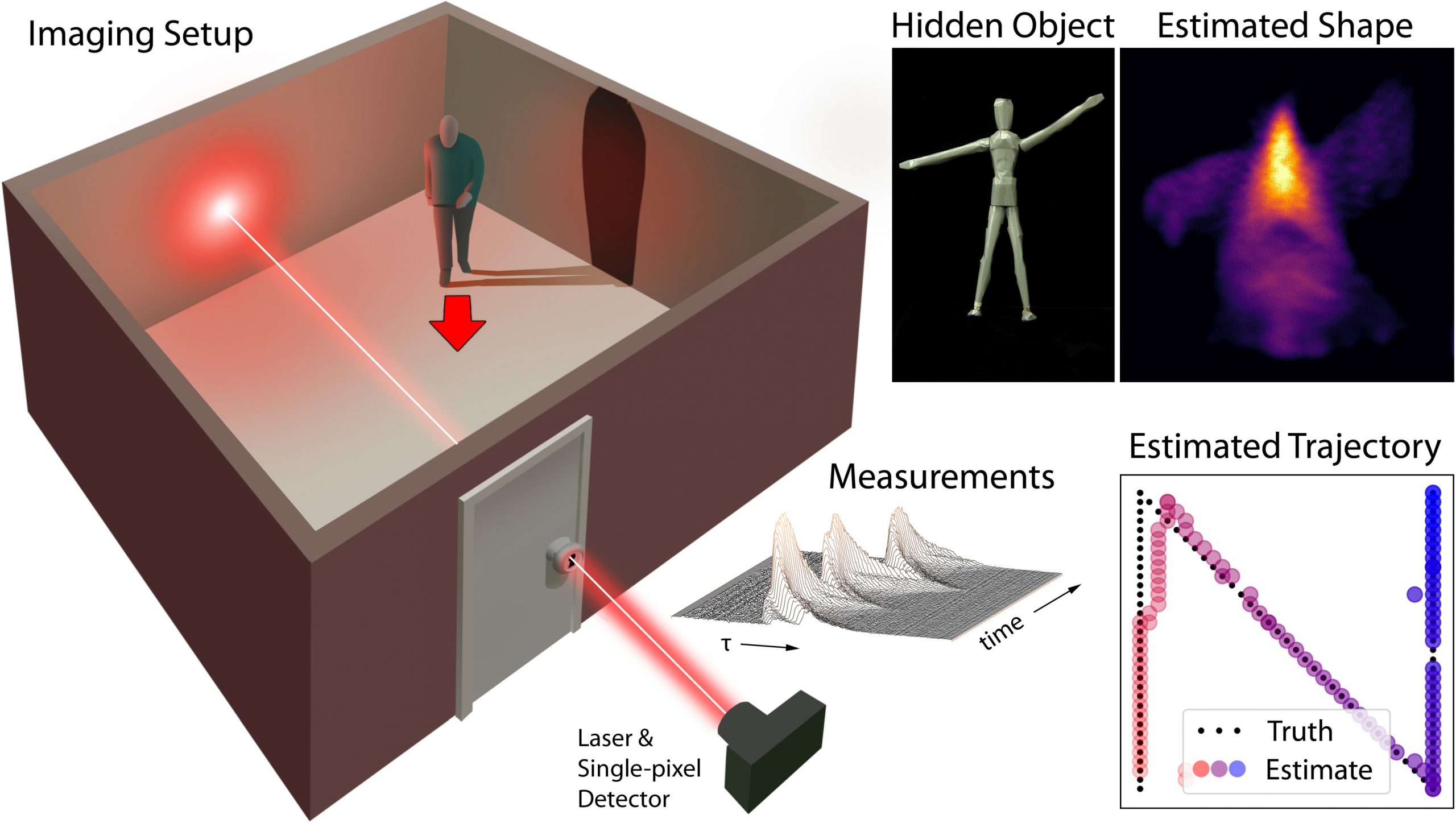
Keyhole imaging. A time-resolved detector and pulsed laser illuminate and image a point visible through a keyhole (left). As a hidden person moves, the detector captures a series of time-resolved measurements of the indirectly scattered light (center). From these measurements, we reconstruct both hidden object shape (e.g., for a hidden mannequin) and the time-resolved trajectory (right).
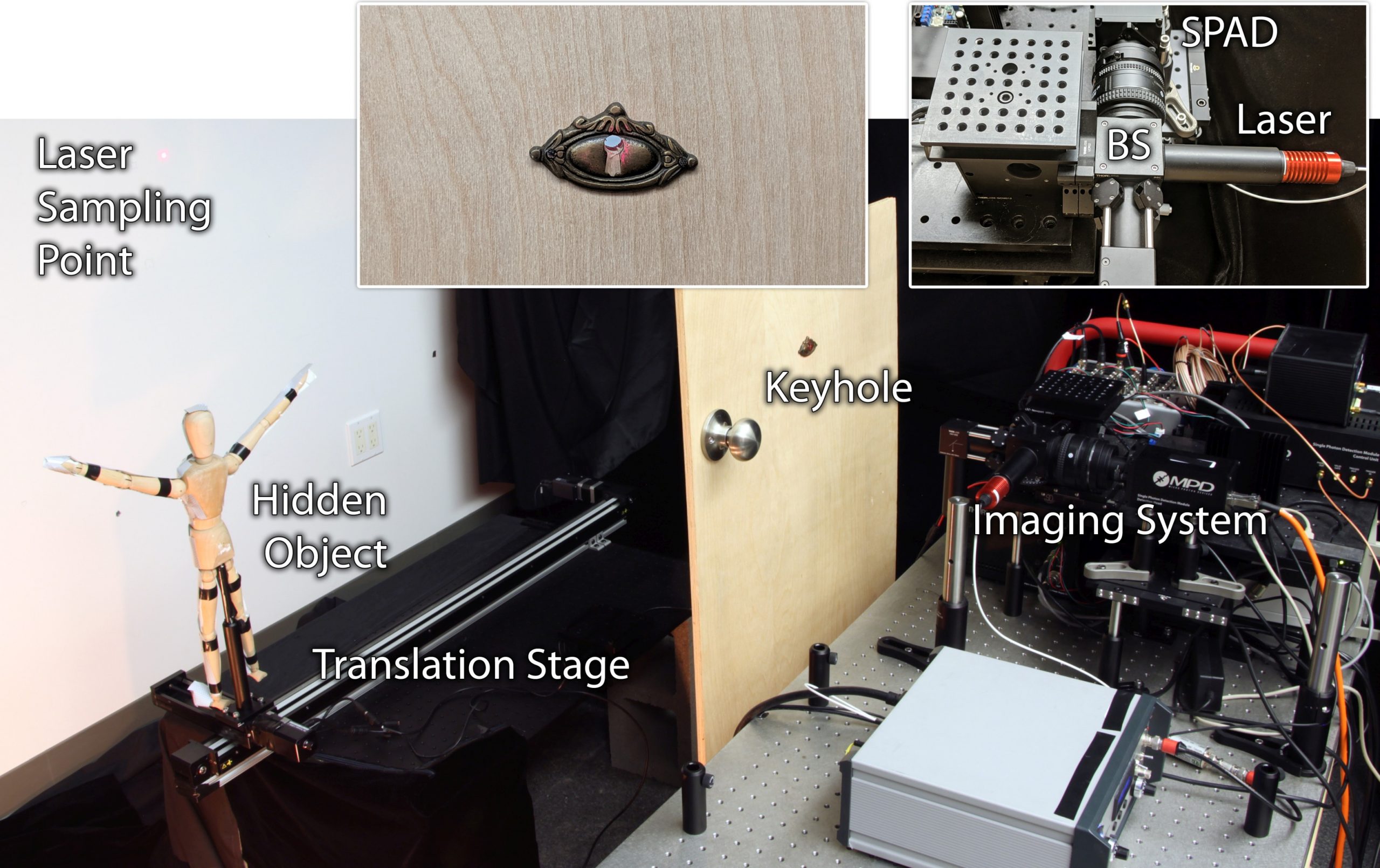
Experimental setup. Our optical system sends a laser pulse through the keyhole of a closed door. On the other side of the door, the hidden object moves along a translation stage. When third-bounce photons return, they are recorded and time-stamped by a SPAD. Top-right inset: A beam splitter (BS) is used to place the laser and SPAD in a confocal configuration.
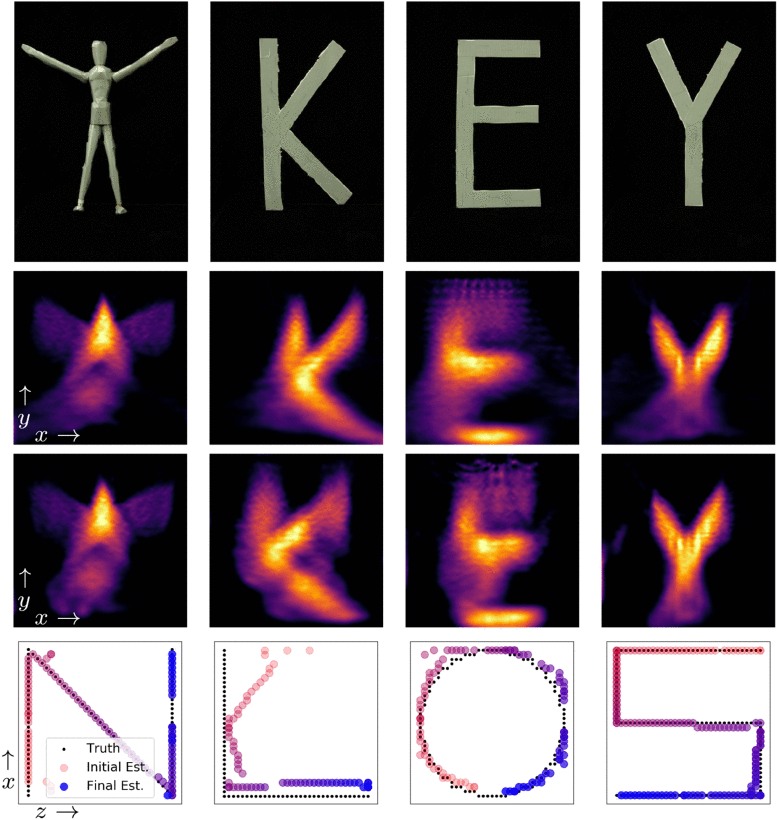
Experimental results. First row: Images of the hidden objects. Second row: Reconstructions of the hidden objects using GD when their trajectories are known. Third row: EM reconstructions of the hidden objects when their trajectories are unknown. Fourth row: EM estimates of the trajectories of the hidden objects, each of which follows a different trajectory, where the dot color indicates position over time. Computational imaging of moving 3D objects through the keyhole of a closed door.
Source: Computational Imaging Keyhole Imaging | IEEE TCI 2021

Robin Edgar
Organisational Structures | Technology and Science | Military, IT and Lifestyle consultancy | Social, Broadcast & Cross Media | Flying aircraft
robin@edgarbv.com
https://www.edgarbv.com